DINO
Tecnologie PM
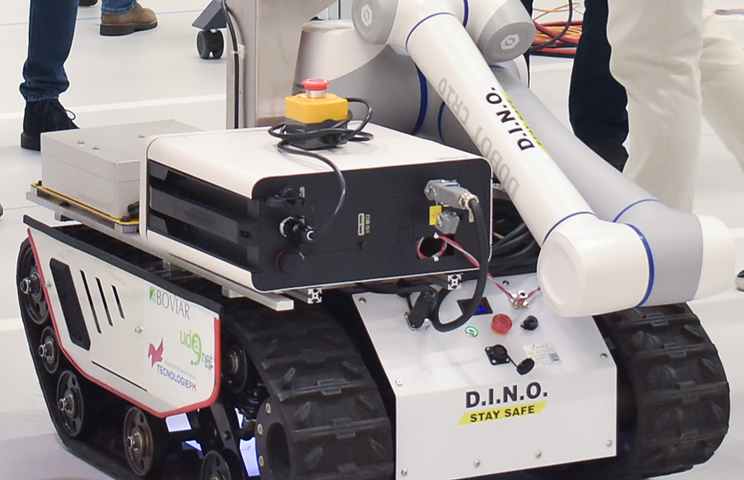
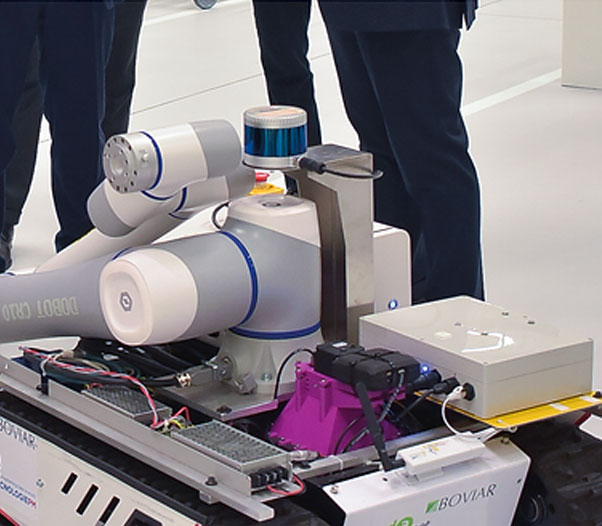
Un veicolo intelligente (UGV) per la costruzione e la gestione dei dati del sottosuolo-infrastrutture-ambiente in grado di operare attraverso un sistema di guida autonoma di secondo livello con operatore al seguito, in completa sicurezza.
nome dell'impresa
Tecnologie PM
titolo del progetto
DINO
dimensione e localizzazione
Consorzio di piccole imprese, Pescara
partner
competenza utilizzate
Il problema
I tempi di acquisizione e la qualità necessari per la costruzione e la gestione dei dati del sottosuolo-infrastrutture-ambiente (reti gas, acqua, fognaria, energia elettrica, telecomunicazioni) impattano, ad oggi, in modo rilevante sui processi previsti dalla pubblica amministrazione nell’aggiornamento delle informazioni catastali.
La soluzione
Tecnologie
- Veicolo intelligente (UGV) in grado di operare con guida autonoma in modalità assistita, in ambienti aperti, eseguendo attività di rilievo e posa sensori di tipologia multipla. L’UGV opera secondo una programmazione diagnostica, in sicurezza, agendo con sensori multipli di posizionamento e prossimità ostacoli. È costituito da un cingolato di ridotte dimensioni, facilita tutte le attività di controllo che debbano essere eseguite in ambienti angusti e/o difficili da raggiungere, si rende indispensabile anche nei rilievi strumentali complessi per ambienti estremi (cunicoli, sottopassi, ponti, gallerie, aree in frana, aree soggette a disastri ambientali attivi).
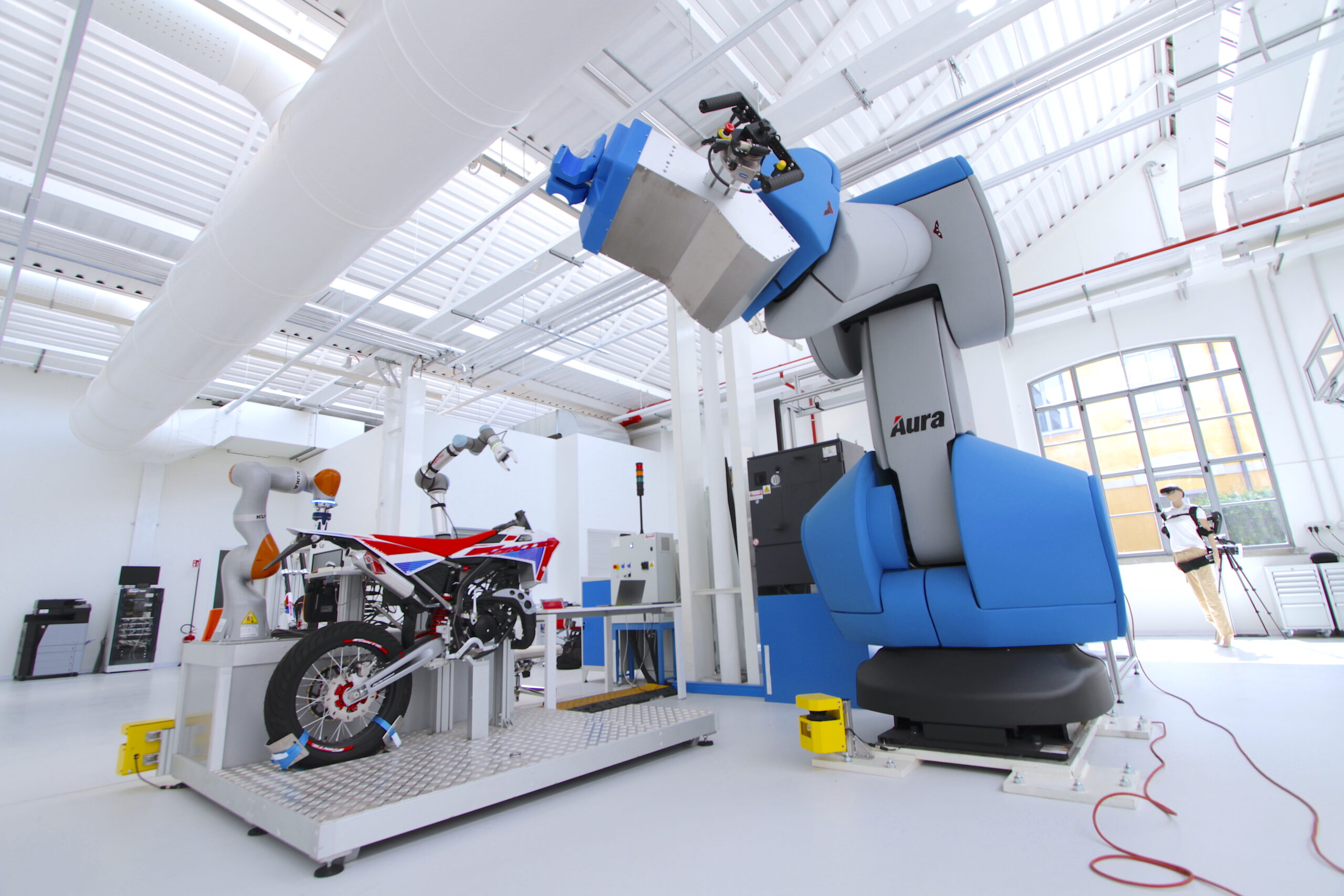
- Braccio robotico, da collocare sull’UGV, dotato di sistema di movimento a multi-snodo, sviluppato mediante algoritmi di deep-learning e reti neurali per consentire l’uso di svariate tecnologie di rilievo e la posa organizzata e programmata di sensori, con l’obbiettivo di facilitare l’attività di mappatura e ottimizzare l’accessibilità e l’ispezione dei sottoservizi e delle infrastrutture.
- Sensoristica IoT per l’acquisizione dei dati caratteristici dell’ambiente operativo oggetto di mappatura (ad esempio: termografia, analisi metereologiche di precisione, analisi fattori di aggregazione veicolare e sociale, analisi dati inquinamenti ambientali), per il tracciamento della posizione dell’UGV e per il monitoraggio del rover da remoto ai fini della sicurezza stradale.
- Realtà aumentata per la restituzione in campo di dati referenziati, attraverso un sistema GPS-IMU e un’innovativa piattaforma di analisi odometrica di precisione, indipendente dalle informazioni GPS, sviluppata con la consulenza e cooperazione della Thales Italia.
- Realtà aumentata a supporto del nuovo modello di gestione del territorio e la nuova modalità di interazione progettuale e manutentiva dei tecnici progettisti e degli addetti alla manutenzione. Tale procedura consentirà ad un operatore di ottenere dati di dettaglio (punti georeferenziati e ricostruzione in campo del rilievo effettuato dal rover) su un dispositivo digitale (occhiale o tablet), predisponendo il sistema per un futuro aggiornamento a nuove interazioni tra più operatori e gestione dati in tempo reale.
Impatti
- Viene creato un sistema univoco di rappresentazione in situ dei dati derivanti dalle informazioni del catasto cartografico nazionale SINFI e/o da rilievi diretti strumentali, con particolare riferimento alle infrastrutture del sottosuolo, di superficie e ambiente.
- Si introducono tecnologie e procedure innovative per supportare le pubbliche amministrazioni, con particolare riferimento al supporto tecnico della gestione ed effrazione del sottosuolo per le infrastrutture.
- Vengono suggerite novità tecnologiche per supportare la decodifica dei dati e dei rilievi del catasto, fornendo una possibilità di gestirli in maniera digitale, creando un modello di interazione PA-Progettisti-Tecnici operativi.
- Vengono sviluppate le prime applicazioni di integrazione dei dati e delle informazioni relative al suolo pubblico con i servizi preposti, abilitando il concetto di smart cities anche in contesti abitativi storici, fortemente condizionati da architetture di pregio o dalla presenza di forti rischi idrogeologici e sismici.
In particolare, la possibilità di acquisire immagini e informazioni 2D-3D consente di creare una rappresentazione di ciò che è presente nel sottosuolo e nelle infrastrutture del soprassuolo, favorendo la consultazione nel relativo catasto SINFI. Tale funzionalità robotizzata non è presente nell’attuale mercato. Inoltre, le immagini e la rappresentazione visiva abilitano una migliore gestione delle attività di manutenzione e una più facile identificazione delle attività di scavo ed effrazione del sottosuolo in caso di nuove costruzioni.
Benefici per l'impresa
- La possibilità di creare un prototipo, successivamente commercializzabile.
- Aumentano le competenze interne.
- Migliora il posizionamento nel panorama dell’innovazione. L’impresa accede ad un mercato in fase di sviluppo e può costruire una leadership in questo campo.
- Costruzione di un archivio di dati organizzati in slot accessibili e commercializzabili, ottenuti grazie al rilevo topografico-strutturale e a diverse tipologie di sensori.